

Okyanuslar, dünya yüzeyinin %70,8’ini kaplamaktadır (Atlantik, Pasifik, Hint, Antarktika ve Arktik Okyanusu). Okyanusların, dünyanın iklimi ve biyolojik canlı çeşitliliği üzerinde büyük etkileri vardır. Dünya üzerindeki taşımacılığın büyük kısmı okyanuslar üzerinde yapılır ve okyanuslar, derinliklerinde insanların kullanabileceği enerji kaynaklarına sahiptir. Yaşam üzerinde bu kadar önemli olmalarına rağmen dünya okyanuslarınsadece %5’i keşfedilmiştir.Bunun sebeplerinden biri de ekonomik anlamda karşılanabilir deniz altı teknolojisi gelişiminin henüz sağlanamamış olmasıdır. Deniz altı teknolojisinin tarihsel gelişimi dört ana başlık altında gruplanabilir :
• Dalgıçların dalış yeteneklerini arttırmasını sağlayan dalış ekipmanlarının (temiz hava tüplü dalış sistemlerinin) gelişimi
• Askeri denizaltılar ve ilişkili teknolojilerin gelişimi
• Derin deniz araştırmalarında kullanılan bilimsel amaçlı denizaltıların ve platform bağımlı su altı araçlarının gelişimi
• İnsanların fiziken dalış yapmadan denizin derinliklerinde çalışmalarını mümkün kılan Uzaktan Kumandalı İnsansız Su Altı Aracı (ROV) ve Otonom İnsansız Su Altı Aracı (AUV) gibi robotik teknolojilerin gelişimi
Sualtı araçları iki ana sınıfa ayrılır: İnsanlı Su Altı Araçları ve İnsansız Su Altı Araçları. Detaylı sınıflandırma aşağıdaki şekilde verilmiştir.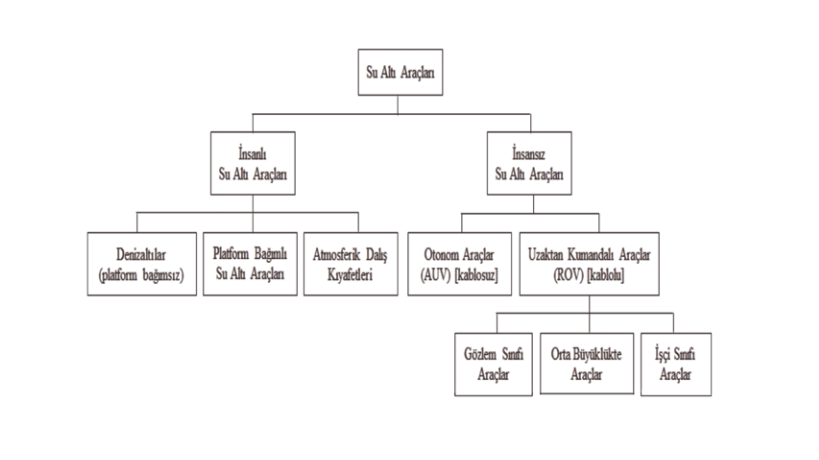
Şekil 1.1 Su Altı Araçlarının Sınıflandırılması
ROV (RemotelyOperatedVehicle), en genel tanımı ile bir operatör tarafından uzaktan kontrol edilerek su altında çeşitli görevleri yerine getiren sualtı robotudur. ROV sistemi; dalıcı gövde, bu dalıcı gövdenin kontrolünün sağlandığı operatör konsolu ve dalıcı gövdeyi yüzeye bağlayan kablodan oluşmaktadır. Şekil 1.2’de bir ROV sisteminin temel bileşenleri gösterilmektedir. ROV’lar boyut ve kullanım şekline göre farklı kategorilere ayrılmaktadır.
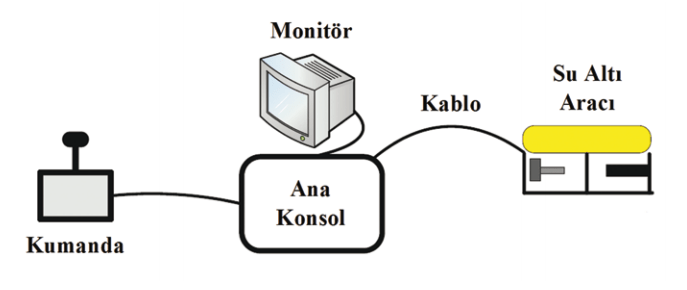 Şekil 1.2 ROV sisteminin temel bileşenleri
Şekil 1.2 ROV sisteminin temel bileşenleri

Şekil 1.3 Farklı boyutlara sahip Gözlem Sınıfı ROV’lar
1. Gözlem Sınıfı ROV’lar (Mikro-Mini ROV’lar) : ROV endüstrisinde kullanılan araçların çoğu “Gözlem Sınıfı Araçlar”dır. Ağırlıkları 100 kg’a kadar çıkabilir ve bu araçlar genellikle 300 metre derinliğe kadar inebilmektedirler. Su altı görüntülerini iletebilen, manevra kabiliyetleri yüksek, basit “manipülatör kol” entegrasyonu yapılabilen sistemlerdir. Operasyonel maliyetleri düşüktür. Vince ihtiyaç duyulmaz, araç ve kablo, yüzeyden el ile denize bırakılıp tekrar el ile denizden çıkarılabilir. Her ne kadar kendinden bataryalı tipleri olsa da ROV’un çalışması için ihtiyaç duyulan enerji, birçok ROV çeşidinde, yüzeyde bulunan bir güç kaynağından kablolar vasıtasıyla ROV’a iletilir.
2. Orta Büyüklükte ROV’lar : Orta Büyüklükte ROV’lar, Gözlem Sınıfı ROV’ların daha büyük ölçekli, daha derine dalabilen ve daha fazla operasyonel yeteneğe sahip versiyonları olarak tanımlanabilir. Orta Büyüklükte ROV’ların ağırlığı 100 kg ile 1000 kg arasındadır. Alternatif-akım veya doğru-akım kullanabilirler. Birçoğunda hidrolik sistemle çalışan bir manipülatör kol vardır. 1000 m ve üzeri derinliklere kadar inebilirler. Boyutları büyük olduğu için genellikle vinç yardımıyla suya indirilirler. Kablo uzunlukları da fazla olduğu için kablo sarım sistemine/ekipmanına ihtiyaç duyarlar.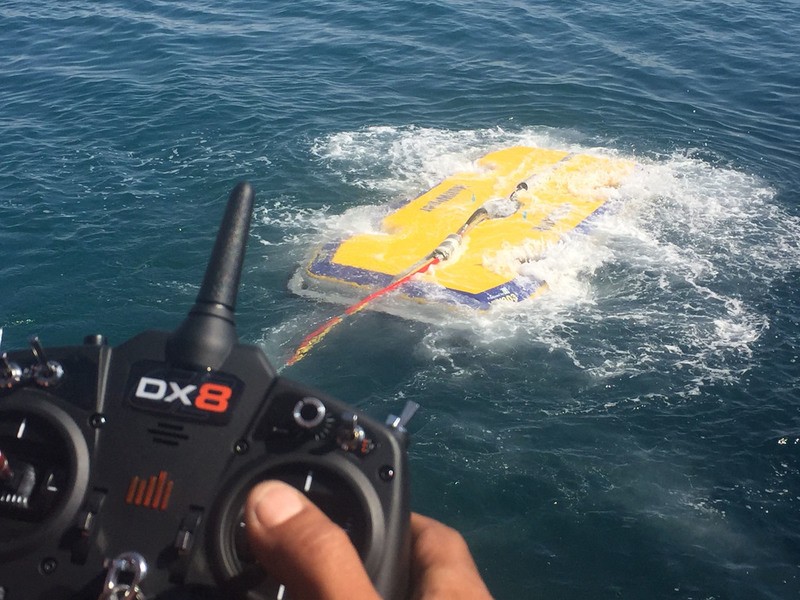
3. İşçi Sınıfı ROV’lar : Deniz endüstrisinin “emektarları” sayılan bu araçların büyük çoğunluğu açık deniz petrol ve doğal gaz sahalarında kullanılmaktadır. Bu araçlar alternatif-akım kullanan, yüksek voltajlarda çalışan elektro-hidrolik araçlardır. Ağırlıkları 5000 kg’a kadar çıkabilir. Vinç ve kablo sarım sistemleri vardır. 3000 m ve üzeri derinliğe inebilirler. ROV’lar alan içinde; su altı keşif ve gözetleme, liman ve kritik alan güvenliği, mayın tanı, teşhis ve imha, batık çalışmaları, ceset ve delil araştırma gibi faaliyetlerde kullanılmaktadır.
Ülkemizde ROV Cihazların Kullanımı
İzmir DEGAK Özel Timi – 6 Komutanlığında yerli bir firma tarafından geliştirilmiş olan gözlem sınıfı ROV mevcuttur. Bu cihaz, 200 metre derinliğe kadar dalabilmekte, hareketli kamera ve güçlü aydınlatma sistemleri ile anlık görüntü aktarımı yapabilmektedir. Cihaz üzerinde bulunan iki boyutlu görüntüleme sonarı ile görüşün olmadığı ortamlarda su altında 120 metreye kadar sonar taraması yapabilmektedir. Cihaz üzerinde bulunan robot kol sayesinde su altında tespit edilen çeşitli nesneler (ceset, dalış tüpü vb.) kolaylıkla satıha çıkartılabilmektedir. Yine ROV üzerinde bulunan akustik haberleşme sistemi sayesinde (USBL) gerekli su altı konumlama, hassas bir şekilde yapılabilmektedir. Sistem, portatif bir yapıya sahip olup iki personel tarafından küçük botlarda dahi kullanılabilmektedir. Sistem, jeneratör ile beslenmekte ve böylece süre sınırı olmaksızın çalışabilmektedir. ROV’unsualtı arama kurtarma faaliyetlerimize kattığı kabiliyetleri şöyle özetleyebiliriz:
• Su altında süre sınırı olmaksızın arama faaliyetlerini sürdürmek,
• İnsan sağlığı için riskli olan derin su aramasını ROV marifetiyle gerçekleştirmek,
• Görüşün olmadığı bulanık sularda, sahip olduğu SONAR marifetiyle arama çalışmaları sağlamak,
• Su altında tespit edilen bir nesneyi, uygunluğu durumunda, dalışa gerek kalmaksızın satıha çıkartabilmek,
• Sadece iki personelle hızlı ve verimli su altı arama faaliyetleri gerçekleştirmek olarak sıralayabiliriz.
ROV sistemi, kullanıma başlandığından bu yana bir çokgörevde kullanılmış ve büyük katkılar sağlamıştır.Örneklendirmek gerekirse ; Balıkesir Ayvalık’ta geçtiğimiz sene batan bir tekne, ROV cihazı ve üzerindeki sonar teknolojisi sayesinde kısa sürede bulunmuş ve çıkartılmıştır.
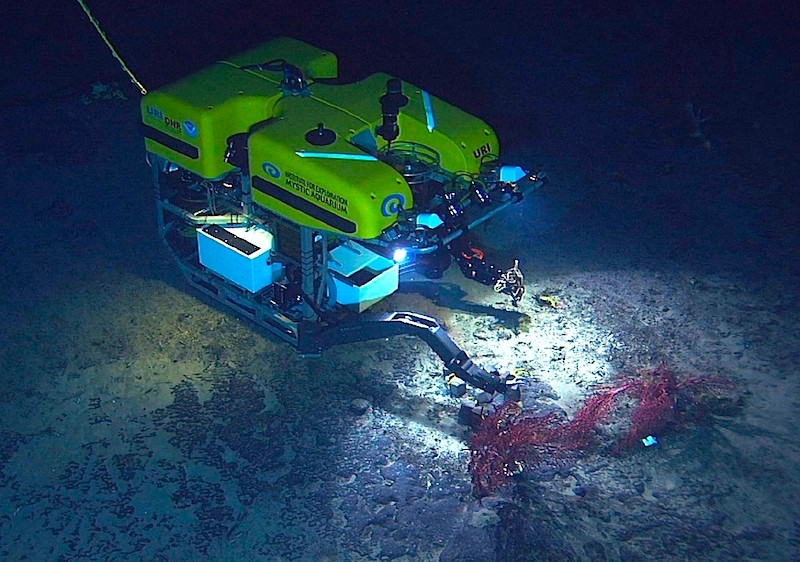
Şekil 1.4 Çalışır durumda bir ROV
Hukuki delil niteliğine sahip bu batık teknenin çıkartılmasıyla, ilgili dava sürecine önemli bir katkı sağlanmıştır. ROV teknolojisinin kabiliyetinin ve verimliliğinin daha ileriye taşınması hedeflenmektedir. Özellikle yerli firmalarca yürütülen çalışmalar, ülkemizin yerli teknoloji gelişimine önemli katkılar da sağlamaktadır.
Barış Enes Bayır
KAYNAKLAR : (1) Christ, Robert D. ve WernliSr., Robert L., 2014. The ROV Manual: A User Guide forRemotelyOperatedVehicles, Second Edition, Elsevier, USA.
(2) NationalOceanicandAtmospheric Administration, Haziran 2017. How Much of the Ocean HaveWeExplored [online] http://oceanservice.noaa.gov/facts/exploration.html
(3) Moore, Steven W., Bohm, Harry ve Jensen, Vickie, 2010. UnderwaterRobotics: Science, Design &Fabrication, Marine Advanced TechnologyEducation Center, USA.

